Jõudluse optimeerimine MPU-6050-ga: seadistamine, kalibreerimine ja rakendused
2024-04-25
9253
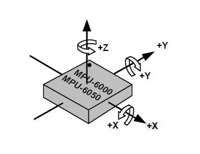
MPU-6050 on maailma esimene integreeritud 6-teljeline liikumisprotsessikomponent, mis integreerib 3-teljelise güroskoobi, 3-teljelise kiirendusmõõturi ja skaleeritava digitaalse liikumisprotsessori (DMP).Selle kasutamise eesmärk on saada mõõdetava objekti (näiteks quadcopter, tasakaalustav auto) X-, Y- ja z -telgedel, see tähendab pigi nurga, rullnurga ja hambanurga.Lugesime I2C liidese kaudu kuus MPU-6050 (kolmeteljelise kiirenduse AD-väärtust ja kolmeteljelise nurgakiiruse AD väärtust).Pärast kehahoiakute töötlemist saab arvutada sammu, rulli ja hambanurgad.Mõõtmisväärtuste suundiviidena on anduri koordinaadi suuna määratlus nagu näidatud alloleval joonisel, mis järgib paremakäelise koordinaatsüsteemi põhimõtet (see tähendab, et parem pinge osutab X- positiivsele suunaleTelg, nimetissõrm osutab y-telje positiivsele suunale ja keskmine sõrm osutab z-telje positiivsele suunale).
Kataloog
Oma spetsiaalse I2C anduri siini abil saab MPU-6050 saada sisendit otse välisest 3-teljelisest kompassist, pakkudes täielikku 9-teljelist MotionFusion ™ väljundit.See välistab lahknevuse probleemi kombineeritud güroskoobi ja kiirendi ajajoone vahel ning vähendab märkimisväärselt pakendiruumi võrreldes mitmekomponendiliste lahendustega.Kolmeteljelise magnetomeetriga ühendamisel on MPU-60X0 võimeline pakkuma täielikku 9-teljelist liikumissulamist oma peamisele I2C või SPI-pordile (pange tähele, et SPI-port on saadaval ainult MPU-6000-l).
Alternatiivid ja samaväärsed
- MPU-3300
- MPU-6000
- MPU-6500
MPU-6050 tootja
MPU-6050 tootja on TDK.Pärast TDK kahte asutajat dr Yogoro Kato ja Takei Takei leiutasid Tokyos Ferriidi, asutasid nad Tokyo Denkikagaku Kogyo K.K.1935. aastal on TDK globaalse elektroonikatööstuse brändina säilitanud alati domineeriva positsiooni elektrooniliste toorainete ja elektrooniliste komponentide valdkonnas.TDK terviklik ja innovatsioonipõhine tooteportfell hõlmab passiivseid komponente nagu keraamilised kondensaatorid, alumiiniumist elektrolüütilised kondensaatorid, kilekondensaatorid, magnettooted, kõrgsageduslikud komponendid, piesoelektrilised ja kaitseseadmed, samuti andurid ja andurisüsteemid (nagu näiteks temperatuur ja surve, nagu näiteks survel, ning surve, aga nagu survel ja surve, aga nagu temperatuur ja surve.Magnet- ja MEMS -andurid) jne. Lisaks pakub TDK ka toiteallikaid ja energiaseadmeid, magnetilisi päid ja muid tooteid.Selle tootebrändide hulka kuuluvad TDK, EPCOS, Invensense, Micronas, Tronics ja TDK-Lambda.
MPU-6050 siseplokkide diagramm
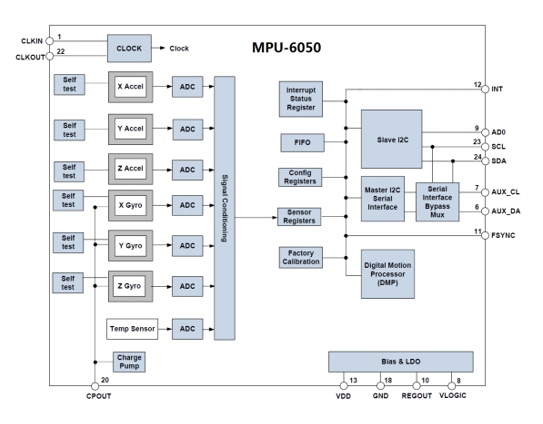
Nende hulgas on SCL ja SDA MCU-ga ühendatud IIC liidesed ja MCU kontrollib selle IIC liidese kaudu MPU-6050.Seal on ka IIC liides, nimelt AUX_CL ja AUX_DA.Seda liidest saab kasutada väliste orjaseadmete, näiteks magnetiliste andurite ühendamiseks üheksateljelise anduri moodustamiseks.Vlogic on IO pordi pinge.See tihvt toetab vähemalt 1,8 V.Tavaliselt ühendame selle otse VDD -ga.AD0 on orja IIC liidese aadressi juhtimisnõel (ühendatud MCU -ga).See tihvt kontrollib IIC -aadressi madalaimat bitti.Kui see on ühendatud GND-ga, on MPU-6050 IIC aadress 0x68;Kui see on ühendatud VDD -ga, on see 0x69.Pange tähele, et siinne aadress ei sisalda madalaimat andmeedastust (madalaimat bitti kasutatakse lugemis- ja kirjutamisoperatsioonide esindamiseks).MWbalatedStc15-l on AD0 GND-ga ühendatud, seega on MPU-6050 IIC aadress 0x68 (välja arvatud madalaim bit).
Initsialiseerige IIC liides
MPU-6050 kasutab STC15-ga suhtlemiseks IIC-d, nii et peame kõigepealt MPU-6050-ga ühendatud SDA ja SCL-andmeliinid lähtestama.
Lähtestage MPU-6050
See samm taastab kõik MPU-6050 registrid nende vaikeväärtusteni, mis saavutatakse, kirjutades 1 toitehaldusregistri 1 bit7-le (0x6b).Pärast lähtestamist taastatakse toitehaldusregister 1 vaikeväärtus (0x40) ja see register tuleb hiljem seada 0x00-le, et äratada MPU-6050 ja viia see normaalsesse tööseisundisse.
Seadke nurkkiiruse anduri (GYRO) ja kiirenduse anduri täisskaala vahemik
Selles etapis määrame kahe anduri täisskaala vahemiku (FSR) vastavalt güroskoobi konfiguratsiooniregistri (0x1b) ja kiirenduse anduri konfiguratsiooniregistri (0x1C).Tavaliselt seadsime güroskoobi täismõõtme vahemikku ± 2000dps ja kiirendusmõõturi täismõõtme vahemikus ± 2G.
Seadke muud parameetrid
Siin peame ka konfigureerima järgmised parameetrid: lülitage katkestused välja, keelake AUX I2C liides, keelata FIFO, seadistada güroskoobi proovivõtu kiirus ja konfigureerida digitaalne madala pääsemisega filter (DLPF).Kuna me ei kasuta katkestusi selle peatüki andmete lugemiseks, tuleb katkestusfunktsioon välja lülitada.Samal ajal, kuna me ei kasuta Aux I2C liidest teiste väliste andurite ühendamiseks, peame selle liidese sulgema.Neid funktsioone saab kontrollida katkestuse lubamise registri (0x38) ja kasutajakontrolli registri (0x6A) kaudu.MPU-6050 saab kasutada FIFO-d andurite andmete salvestamiseks, kuid me pole selles peatükis kasutanud, seega tuleb kõik FIFO kanalid sulgeda.Seda saab juhtida FIFO lubamise kaudu (0x23).Vaikimisi on selle registri väärtus 0 (see tähendab, et FIFO on keelatud), seega saame vaikimisi väärtust otse kasutada.Güroskoobi proovivõtu kiirust kontrollib proovivõtu kiiruse jagaja register (0x19).Tavaliselt määrame selle proovivõtu kiiruse väärtuseks 50. Digitaalse madalpääsfiltri (DLPF) konfiguratsioon lõpeb konfiguratsiooniregistri (0x1a) kaudu.Üldiselt määrame andmete täpsuse ja reageerimise kiiruse tasakaalustamiseks DLPF poole ribalaiusesse.
Seadistage süsteemi kellaallikas ja lubage nurkkiiruse andur ja kiirenduse andur
Süsteemi kellaallika seadistamine sõltub toitehaldusregistrist 1 (0x6b), kus selle registri madalaim kolm bitti määravad kellaallika valimise.Vaikimisi seatakse need kolm bitti väärtusele 0, mis tähendab, et süsteem kasutab kellaallikana sisemist 8MHz RC ostsillaatorit.Kella täpsuse parandamiseks seadsime selle sageli 1 ja valime kellaallikaks X-telje güroskoobi PLL.Lisaks on oluline samm initsialiseerimisprotsessis ka nurkkiiruse anduri ja kiirenduse anduri võimaldamine.Mõlemat toimingut rakendatakse energiahalduse registri 2 kaudu (0x6C).Seadke vastav anduri aktiveerimiseks lihtsalt vastav bit väärtuseks 0.Pärast ülaltoodud sammude lõpetamist saab MPU-6050 siseneda tavapärase tööseisundi.Need registrid, mis pole spetsiaalselt määratud, võtavad süsteemi vaikeväärtused kasutusele.
Kuidas MPU-6050 töötab?
Güroansor
Andur on varustatud gürosiga, mis jääb güroskoopilise efekti tõttu alati algse suunaga paralleelseks.Seetõttu saame arvutada pöörlemissuuna ja nurga, tuvastades GYRO kõrvalekalde algsuunast.
Kiirendusmõõturi andur
Kiirendusmõõturi andur on seade, mis suudab mõõta kiirendust ja töötab piesoelektrilise efekti põhimõttel.Kiirenduse ajal mõõdab andur massiplokile rakendatavat inertsiaalset jõudu ja arvutab seejärel kiirenduse väärtuse Newtoni teise seaduse abil.
Digitaalne liikumisprotsessor (DMP)
DMP on MPU6050 kiibis andmetöötlusmoodul, millel on sisseehitatud Kalmani filtreerimisalgoritm güroskoobi ja kiirendusmõõturi andurite andmete saamiseks ning väljundkvaternide töötlemiseks.See funktsioon vähendab oluliselt perifeerse mikroprotsessori töökoormust ja väldib tüütut filtreerimis- ja andmete sulandumisprotsessi.
Märkused:
Quaternionid: Quaternionid on lihtsad superkompleksnumbrid.Komplekssed numbrid koosnevad reaalarvul ja kujuteldavast üksusest I, kus i^2 = -1.
Kus kasutatakse MPU-6050?
- mänguasjad
- telefonitoru ja kaasaskantav mäng
- liikumispõhised mängukontrollerid
- Blurfree ™ tehnoloogia (video/pildi stabiliseerimise jaoks)
- AirSign ™ tehnoloogia (turvalisuse/autentimiseks)
- Instantgesture ™ IG ™ žesti tuvastamine
- Tervise, sobivuse ja spordi kantavad andurid
- Motion-toega mängu- ja rakenduste raamistik
- MotionCommand ™ tehnoloogia (lühilõikude žesti jaoks)
- asukohapõhised teenused, huvipunktid ja surnud arvestamine
- 3D -kaugjuhtimispuldid Interneti -ühendatud DTV -de jaoks ja seadistage ülakastid, 3D -hiired
- TouchAnywhere ™ tehnoloogia (puudutuseta kasutajaliidese rakenduste juhtimine/navigeerimine)
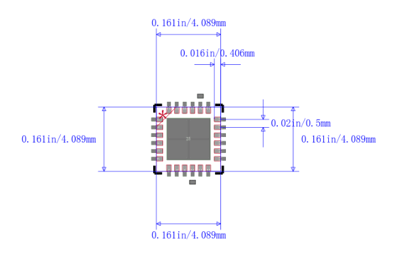
MPU-6050 pakett
Kuidas vähendada MPU-6050 müra?
MPU-6050 müra vähendamiseks võime võtta järgmisi viise.
Kasutage kalibreeritud andureid
MPU-6050 kiirendusmõõturi ja güroskoobi kalibreerimine võib kõrvaldada andurite endi eelarvamused ja vea, vähendades sellega müra mõju.Kalibreerimisprotsess koosneb tavaliselt kahest etapist: staatiline kalibreerimine ja liikumise kalibreerimine.
Riistvara filtreerimisprotsess
Filtri kondensaatorite lisamine MPU-6050 elektriliinile võib vähendada toitemüra mõju andurile.Vahepeal peaksime PCB paigutuse ajal proovima hoida MPU-6050 eemal võimalike häireallikate, näiteks kõrgsageduslike signaalide joonte ja suure võimsusega komponentide eest.
Tarkvara filtreerimise töötlemine
Pärast MPU-6050-st töötlemata andmete kogumist saame mürast põhjustatud häirete kõrvaldamiseks lisada tarkvara filtreerimise lingi.Tavaliselt kasutatavad tarkvara filtreerimismeetodid hõlmavad keskmist filtreerimist, keskmist filtreerimist, Kalmani filtreerimist ja nii edasi.
Kasutage sisemist madala pääsemisfiltri
MPU-6050-l on sisemine integreeritud digitaalne madalpääsfilter, mida saab kasutada kõrgsagedusliku müra vähendamiseks, määrates selle piirsageduse.Täpsemalt, saame digitaalse filtri piirsageduse seada, muutes MPU-6050 konfiguratsiooniregistrit, et kõrvaldada kõrgsagedusmüra, mis on põhjustatud A/D proovivõtmisest.
MPU-6050-põhine liikumistrajektoori arvutamine
MPU-6050 on kuueteljelise kiirendusmõõtur ja güroskoobi andur, mida saab kasutada objektide liikumise ja suhtumise mõõtmiseks.MPU-6050-l põhinevat liikumistrajektoori arvutust saab realiseerida järgmiste sammudega:
Esimene samm on anduri andmete lugemine.Peame lugema MPU-6050 andurite kiirendusmõõturi ja güroskoobi andmeid, kasutades sobivaid draivereid ja raamatukogu funktsioone.Neid andmeid väljastatakse tavaliselt digitaalses vormingus, seetõttu on füüsiliste ühikute tegelikeks mõõtmiseks vajalikuks muundamise ja kalibreerimistöö.
Teine samm on kiirenduse arvutamine.Esiteks peame iga telje kiirenduse saamiseks töötlema kiirendusmõõturi andmeid.Seejärel peame iga telje kiiruse ja nihke arvutamiseks integreerima kiirenduse andmed.Numbrite arvutuste täpsuse tagamiseks kasutatakse selles protsessis sageli numbrilisi integreerimismeetodeid, näiteks Euleri meetodit või lunger-kutta meetodit.
Kolmas samm on nurkkiiruse arvutamine.Güroskoobi andmete abil saab arvutada objekti nurgakiiruse.Need andmed tuleb jällegi kalibreerida ja teisendada, et saada nurkkiirus tegelikes füüsilistes ühikutes.
Neljas samm on pöörlemise arvutamine.Nurgakiiruse andmete integreerimisega saab arvutada objekti pöörlemisnurga igas teljes.Seda saab teha numbriliste integreerimistehnikate abil nagu Euleri meetod või nurga arvutamiseks Longe-Kutta meetod.
Viies samm on andmete ühendamine.Kombineerime kiirenduse ja güroskoopide andmed, et saada objekti täielik suhtumine ja positsioon.Seda saab teha selliste algoritmide abil nagu Quaternionil põhinev suhtumise lahendaja või Euleri nurga lahutaja.
Kuues samm on tulemuste visualiseerimine.Teisendame arvutatud objekti liikumistrajektoori 3D -koordinaatsüsteemi punktide kogumiks ja kuvame seda sobivate visualiseerimisvahendite abil, et saada intuitiivsem mõistmine objekti liikumistrajektoori ja suhtumise muutuste kohta.
Korduma kippuvad küsimused [KKK]
1. Kui täpne on MPU6050?
Omandatud tulemused näitasid piisavat täpsust vähem kui 1 % ja töökindluse, tagades lifti võlli õige mõõtme ja tõstetööstuse kõrged standardid.
2. Kuidas lugeda MPU6050 andmeid?
MPU6050 sisemise registrite lugemiseks saadab kapten starditingimuse, millele järgneb I2C orja aadress ja kirjutamisbitt ning seejärel loetavaks loetava registri aadress.
3. Kus kasutatakse MPU6050?
Kantavate tervisejälgimise, sobivuse jälgimise seadmetes.Droonides ja kvadkopterites kasutatakse positsiooni juhtimiseks MPU6050.Kasutatakse robotkäe juhtimisel.Käte žestide juhtimisseadmed.
4. Kas MPU6050 on IMU?
MPU6050 IMU anduri plokk loeb riistvaraga ühendatud MPU-6050 anduri andmeid.Plokk väljub anduri telgede kiirendus, nurkkiirus ja temperatuur.
5. Milline on MPU6050 töötlemine?
See on MPU6050 pardaprotsessor, mis ühendab kiirendusmõõturist ja güroskoobist tulenevad andmed.DMP on MPU6050 kasutamise võti ja seda selgitatakse hiljem üksikasjalikult.Nagu kõigi mikroprotsessorite puhul, vajab DMP käivitamiseks püsivara.
funktsiooni test.Kõige kõrgemad kulutõhusad tooted ja parim teenus on meie igavene kohustus.
Kuum artikkel
- On CR2032 ja CR2016 vahetatavad
- MOSFET: määratlus, tööpõhimõte ja valik
- Relee paigaldamine ja testimine, relee juhtmestiku skeemide tõlgendamine
- CR2016 vs CR2032 Mis vahe on
- NPN vs PNP: Mis vahe on?
- ESP32 vs STM32: milline mikrokontroller on teie jaoks parem?
- LM358 kahekordne operatiivne võimendi põhjalik juhend: pinoutid, vooluahela skeemid, samaväärsed, kasulikud näited
- CR2032 VS DL2032 VS CR2025 Võrdlusjuhend
- Erinevuste mõistmine ESP32 ja ESP32-S3 tehnilise ja jõudluse analüüs
- RC -seeria vooluringi üksikasjalik analüüs
 NRF24L01 kommunikatsiooni kiibi võimaluste ja rakenduste uurimine
NRF24L01 kommunikatsiooni kiibi võimaluste ja rakenduste uurimine
2024-04-25
 MMBT3904 NPN transistor: selle spetsifikatsioonid, põhjalik rakenduse juhend ja MMBT3904 vs MMBT5551
MMBT3904 NPN transistor: selle spetsifikatsioonid, põhjalik rakenduse juhend ja MMBT3904 vs MMBT5551
2024-04-25
Kuum osa number
 C2012JB2E222M085AA
C2012JB2E222M085AA C1608C0G2A090D080AA
C1608C0G2A090D080AA T499C106K025ATE1K5
T499C106K025ATE1K5 IRG7PH42U-EP
IRG7PH42U-EP MCP4812-E/SN
MCP4812-E/SN MAX4559EEE
MAX4559EEE TC58BVG0S3HBAI4
TC58BVG0S3HBAI4 VE-JNY-CZ
VE-JNY-CZ VI-26X-EU
VI-26X-EU CY8C21534-24PVXI
CY8C21534-24PVXI
- 6MBP160RTA-060
- VHF36G12
- STB25NM60ND
- T491B335K016ZTZL11
- LT8361EMSE#PBF
- T491C226K010ATZ330
- T491C226M006ZTAC00
- SN74CBTD3861PWE4
- TLC7225IDWR
- VNL5030JTR-E
- CD74AC161M
- FAN5702UMP30X
- MSP430G2232IPW20
- ADSP-BF537BBC-5A
- LM324MX/NOPB
- AAT4650IHS-T1
- ADM1278-2ACPZ-U3
- CAT25C128VI
- FM3808-70-T
- LFXP2-5E
- LT3782AFE
- MIC68200YML
- NX3031-B21-HG-1C
- PCF7947AT
- PMMA2631NKWR2
- QS3VH125Q
- SMM665F-LA
- TP3054ADWR
- TVS0511P
- XCS40-3PQG240C
- LD7537GL
- K9F1208U0C-PCBO
- FM6AD2G1GA-5BAGE
- HG28A18612F
- MXT540S-XES-D1H
- PRF-104-12Q1000CMX
- T266SAB/Q
- TXC-06885BIOG
- AD590LH IC