L293D vs L298N: erinevus L293D ja L298N vahel
2024-07-12
5436
Kataloog
Mis eristab L293D ja L298N põhimõtteliselt?Üks silmapaistev tegur on nende praegune käsitsemisvõime.
Selle L293d on loodud pideva vooluga kuni 600 mA kanali kohta, tippvoolud ulatuvad 1,2A -ni lühikesteks perioodideks.
Selle L298n, teisest küljest suudab hallata pidevat voolu 2A kanali kohta, tippudega kuni 3A.See oluline erinevus praeguses võimsuses positsioneerib L298N kõrgemate energiarakenduste jaoks paremini sobivaks.
Kujutage ette, et töötate robotprojektide kallal, mis nõuavad suuremaid mootoreid nõudlikemate ülesannete täitmiseks.Insenerid pöörduvad kõrgeima voolukäitlusvõimaluse tõttu sageli L298N poole.Kas see valik vastab teie konkreetse projekti operatiivsetele nõudmistele?
Ka võimu hajumine ja soojusjuhtimine on ka tegurid, mida tasub kaaluda.L298N, mis on suurem ja vastupidavam komponent, on suurendanud termilise hajumise võimalusi.Selle integreeritud jahutusradiaine aitab soojust paremini hallata kõrge voolu tõmbeperioodi jooksul.
Seevastu L293D, millel puudub spetsiaalne jahutusradiaine, võib vajada täiendavaid jahutuslahendusi või jahutusradiaineid, et vältida kõrge koorma stsenaariumi korral ülekuumenemist.
Mõelge harrastajatele, kes on erinevates projektides mõlemat autojuhti kasutanud.L298N-i sisseehitatud jahutusradiaine pakub sageli usaldusväärsemat ja tõhusamat lahendust püsivateks toiminguteks suure koormuse korral.See ülevaade rõhutab termiliste kaalutluste olulisust, eriti pikema tööperioodiga projektides.
Kas nende kahe autojuhi vahel on pingevahemikus olulisi erinevusi?Jah, seal on.
L293D töötab pingevahemikus 4,5 V kuni 36 V, muutes selle sobivaks madala ja keskmise pingerakenduste jaoks.
Seevastu L298N toetab laiemat pingevahemikku 4,8 V kuni 46 V, võimaldades suuremat paindlikkust ja kasutamist suuremates pingerakendustes.
Praktiliselt tähendab see, et töötades mitmekülgsetel platvormidel, mis võivad nõuda erinevaid pingetasemeid, näiteks DIY automatiseerimissüsteemid või mitmesugused robootikaplatvormid, pakub L298N laiem pingevahemik selget eelist.See paindlikkus lihtsustab energiahaldust erinevates komponentides, suurendades üldist disaini efektiivsust.
Aga kaitsefunktsioonid?L293D-l on sisseehitatud lenditagade dioodid, mis kaitsevad seadet mootorite induktiivsete koormuste tekitatud pingetõusude eest.Seevastu L298N nõuab nende naelu haldamiseks tavaliselt väliseid dioode.
Ehkki väliste dioodide integreerimine võib pakkuda disainilahenduse üle suuremat kontrolli ja võivad jõudlust parandada, lisab see ka vooluringi kujundusele keerukust.
Sujuva kujunduse ja kokkupaneku lihtsuse vaatenurgast eelistavad manustatud süsteemi arendajad L293D -d sageli lihtsamatel projektidel või hariduslikel eesmärkidel.Sisemise kaitsemehhanismide kaasamine vähendab kokkupanekutappe, muutes selle ideaalseks valikuks algajatele projektidele või rakendustele, kus prioriteetseks on lihtsus ja kompaktsus.
Pivotaalne ülevaade on see, et L293D ja L298N vaheline valik tuleks juhtida konkreetsete projekti nõuete järgi.Kui L298N pakub suuremat vooluvõimsust, paremat soojusjuhtimist ja laiemat pingevahemikku, muudavad L293D lihtsuse ja integreeritud funktsioonid selle vähem väärtuslikuks vähem nõudlike või kompaktsete projektide jaoks.
Ükskõik, kas see tegeleb keerukuse, võimsuse või termiliste piirangutega, mõjutab kontekstuaalne nõue otseselt mootorijuhi optimaalset valikut.
Mis on L293D?
STMICROelectronics välja töötatud DC ja astmeliste mootorite juhtimiseks kasutatakse STMICROELECTROONICSi välja töötatud kahekordset H-silla mootori draiverit.
Omadused:
- Kõrge efektiivsusega
- Madal energiatarve
- kindel usaldusväärsus
Rakendused hõlmavad erinevates valdkondades:
- nutikate koduseadmed
- robootika
- intelligentsed sõidukid
Kui sisendpinge nõue on 7 V, töötab L293D töötava toiteallika pinge vahemikus 4,5 V kuni 36 V.See lai valik tagab erineva stsenaariumi korral kohanemisvõime.Selle vastupidav disain toetab operatsiooni temperatuurivahemikus -40 ° C kuni 150 ° C.Lisaks on kiibil muljetavaldavalt madal töövool kõigest 2 mA ja see võib pakkuda kõrge väljundvoolu 600 mA, kahekordsete väljunditega suurendab selle praktilisust.
Alternatiivsed komponendid hõlmavad:
- L293DD
- L293E
Kuidas suudab L293D säilitada nii vähe energiatarbimist, pakkudes samal ajal kõrge väljundvoolu?See on tingitud tõhusast siseahelast, mis minimeerib töö ajal soojuse hajumist.
Praktilistes rakendustes näitab L293D juurutamine sageli selle tõhusust.Näiteks:
- Insenerid kasutavad seda juhi sageli väikeste robotite ja automatiseeritud süsteemide ehitamisel, mis nõuavad täpset mootori juhtimist.
- Autonoomses sõiduki prototüübis juhib L293D mootorifunktsioone sujuva navigeerimise saavutamiseks.
Minu vaatenurgast paistab L293D silma oma mitmekülgsuse tõttu.Vaatamata uuemate mootorsõidukite saabumisele muudab selle kiibi tasakaal lihtsuse ja võimekuse tasakaal sageli eelistatud valikuks, eriti hariduslikel eesmärkidel ja DIY projektidel.See eelistus vihjab laiemale elektroonika põhimõttele: kõige tõhusamad lahendused pole alati uusimad uuendused, vaid need, mis sulavad usaldusväärsuse, lihtsuse ja jõudluse.
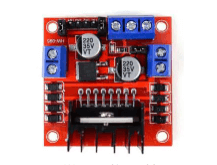
Mis on L298N?
STMICROelectronics toodetud mootorijuhi kiib L298N on konstrueeritud nii alalisvoolu mootorite kui ka astmeliste mootorite juhtimiseks.See mitmekülgne kiip integreerib mitut funktsionaalsust, sealhulgas loogika juhtimine, väljundvõimsuse etapid, temperatuuri kompenseerimine ja ülekoormuse kaitseahelad.
Töötledes erinevaid juhtsignaale, suudab L298N saavutada mootori ettepoole ja tagurpidi pöörlemise, samuti PWM -i kiiruse juhtimise.Millistest konkreetsetest stsenaariumidest võiks sellisest mitmekülgsest kontrollist kõige rohkem kasu olla?Näiteks robootikarakendused nõuavad sageli täpseid motoorseid liikumisi.
See kiip suudab tarnida kuni 2A väljundvoolu, mis muudab selle sobivaks mitmekesiseks mootori juhtimisrakenduste jaoks.Toiteallika pingevahemikus 2,5 V kuni 48 V töötades pakub see märkimisväärset paindlikkust erinevate mootori nõuete täitmiseks.Kas on olemas alternatiivseid laastu?Jah, L298n asendajad hõlmavad:
- L298P
- L293DD
- L6206N
- L6207QTR
- L6225N
- L6227DTR
Miks peaks mõistma L298N praktilisi rakendusi?Robootika puhul on täpset liikumist vajavate ülesannete jaoks hädavajalik mootorite kiiruse ja suuna kontrollimine.Näiteks muutub keerukate keskkondade kaudu navigeerimine mootori täpse juhtimisega teostatavaks.STEM-i hariduses kasutatakse L298N sageli, kuna selle tugev disain ja väiksemate vigade tolerants pakuvad õpilastele praktilist õppeplatvormi.
L298Ni disaini teine aspekt on selle sisseehitatud dioodid, mis kaitsevad pingetõusud, mille tekitavad induktiivsed mootorid.See kaitsefunktsioon aitab vältida nii kiibi kui ka liidese mikrokontrolleri kahjustusi.Seetõttu eelistavad kogenud insenerid sageli L298N projektidele, mis nõuavad usaldusväärset mootori juhtimist ja märkimisväärset mootori kaitset.
Minu vaatenurgast paistab L298N silma mitte ainult oma tehniliste spetsifikatsioonide, vaid ka praktiliste rakenduste poolest.Selle võime hallata erinevaid mootoritüüpe ja tugevaid kaitsemehhanisme muudab selle suurepäraseks valikuks nii hariduslike kui ka professionaalsete projektide jaoks, kus on hädavajalik.
Mis on H-silla konfiguratsioon?
H-sild on elektrooniline vooluring, mis on loodud koormusele rakendatud pinge polaarsuse vahetamiseks.Seda vooluahelat kasutatakse sageli robootika ja mitmesuguste muude väljade korral, et DC mootorid saaksid töötada kas edasi või tagasi.Kuid kuidas täpselt H-sild selle saavutab?Muutes alalisvoolu mootorile tarnitud toite polaarsust, saab selle pöörlemise suunda muuta.See konfiguratsioon ei piirdu ainult suunamuutustega;See võib hõlbustada ka pidurdamise ja vabakäigu režiime.
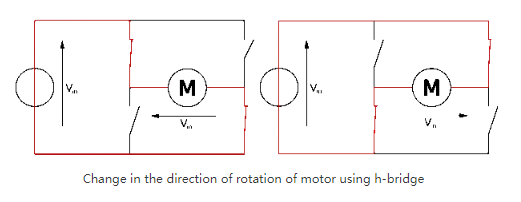
Pidurdusrežiimiga tegeledes võimaldab H-sild mootoril kiiresti peatuda.See teeb seda mootori klemmide tõhusalt lühistades, muutes mootori kineetilise energia elektrivooluks.See mehhanism võimaldab kiiret aeglustust.Teisest küljest lõpeb mootor vabakäigu režiimis järk -järgult tema enda inertsuse tõttu.
Huvitav on see, et inimkogemused H-silla ahelatega näitab veelgi praktilisemaid rakendusi.Mootori kiiruse ja asukoha täpset kontrolli vajavates olukordades seotakse H-sillad sageli tagasisidemehhanismide, näiteks kooderitega.See kombinatsioon tagab täpsed kohandused, suurendades märkimisväärselt selliste süsteemide jõudlust nagu robotrelvad ja automatiseeritud juhitavad sõidukid.
H-silla disainilahenduste progresseerumine on samuti viinud tõhusamate ja tugevamate komponentideni.Kaasaegsed H-silla integreeritud vooluringid hõlmavad nüüd sisseehitatud kaitset, nagu ülevoolu, lühise ennetamine ja termilised ülekoormuse kaitsemeetmed.Neid hallati tavaliselt varasemate disainilahenduste väliste komponentide kaudu.Nende omaduste integreerimine ei suurenda mitte ainult ohutust, vaid lihtsustab ka kogu vooluringi.See lihtsustamine muudab H-sillad nii harrastajatele kui ka õpilastele kättesaadavamaks.
Kokkuvõtlikult võib H-silla konfiguratsioon motoorse juhtimise korral kohaneda ja ülioluline element.See pakub laia valikut funktsioone:
- Mootori pöörlemise suuna muutmine
- kiire pidurdamise võimaldamine
- inertsipõhise peatumise lubamine
H-silla ahelate pidev viimistlus ja praktiline kohanemine rõhutavad nende olulisust tänapäevastes elektroonilistes ja robotsüsteemides.
Pinouti diagramm L293D ja L298N jaoks
L293D pinouti skeem
L293D on neljakordselt kõrge voolu pool-H draiver.See võib pakkuda kahesuunalisi ajamivoolu kuni 600 Ma pingetel vahemikus 4,5 V kuni 36 V. See draiver on eriti populaarne robootika ja autotööstuse sektorites alalisvoolu mootori suuna ja kiiruse juhtimiseks.Kuid miks kalduvad insenerid nendes rakendustes sageli L293D kasutamisele?Üks põhjus on võime käsitseda mitut mootorit ja integreerimise lihtsust erinevatesse süsteemidesse.
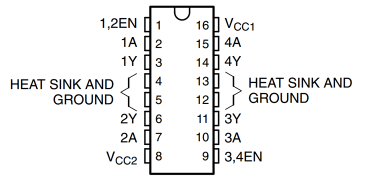
Allpool on L293D Pinouti diagramm:
- Pin 1 (luba 1,2): aktiveerib tihvtide 2 ja 7 sisendsignaalid.
- Nööpnõelad 2, 7 (sisend 1, sisend 2): juhtige 3 ja 6 -ga ühendatud väljundeid.
- Nööpnõelad 3, 6 (väljund 1, väljund 2): lingitud mootori klemmidega.
- Pin 4, 5 (maapind 1, maapind 2): kinnitatud toiteallika külge.
- PIN 8 (VCC2): tarnib mootoritele energiat.
- Pin 9 (luba 3,4): aktiveerib tihvtide 10 ja 15 sisendsignaalid.
- Nööpnõelad 10, 15 (sisend 3, sisend 4): ajage väljundid, mis on ühendatud nööpnõeladega 11 ja 14.
- Nööpnõelad 11, 14 (väljund 3, väljund 4): ühendatud mootori klemmidega.
- Pin 12, 13 (maapind 3, jahvatatud 4): kinnitatud toiteallika külge.
- PIN 16 (VCC1): tarnib loogikapinget.
Huvitaval kombel on mootori juhile täpsete signaalide edastamiseks üliolulised.Näiteks kas väliste takistite või filtrite lisamine võimaldab tihvte suurendada signaali stabiilsust ja minimeerida müra?Sellised tavad võivad tõepoolest märkimisväärselt parandada mootori juhtimissüsteemide usaldusväärsust.
Pinouti diagramm L298N jaoks
L298N on kahe DC mootori suuna ja kiiruse juhtimisel silma paista kahekordne H-silla mootori juht.See toetab kuni 2 A pidevat voolu kanali kohta ja töötab pingevahemikus 5 V kuni 35 V. See draiver leiab oma tugevuse nõudlikumates auto- ja tööstusrakendustes, mis nõuavad suuremat vooluvõimsust.
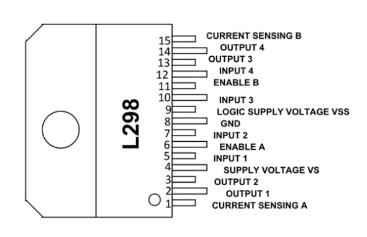
Allpool on l298n Pinouti diagramm:
- Pin 1 (luba a): aktiveerib kanal A sisendi.
- Pin 2 (sisend 1): kontrollib kanali A esimese poolsilla.
- Pin 3 (väljund 1): esimene väljund kanali jaoks A jaoks A
- Pin 4, 5 (maapind): ühendatud toiteallikaga.
- Pin 6 (väljund 2): kanali A teine väljund A teine väljund
- Pin 7 (sisend 2): kontrollib kanali A teist poolsilla.
- PIN 8 (VSS): tarnib loogikapinget.
- Pin 9 (luba B): aktiveerib kanali B sisendi B.
- Pin 10 (sisend 3): kontrollib kanali B esimest poolsilla B.
- Pin 11 (väljund 3): esimene väljund kanali B jaoks B
- Pin 12, 13 (maapind): ühendatud toiteallikaga.
- Pin 14 (väljund 4): kanali B teine väljund B.
- Pin 15 (sisend 4): kontrollib kanali B teist poolsilla B.
- PIN 16 (VSS): tarnib mootori pinget.
Huvitav on see, kas soojuse hajumise mehhanismide, näiteks jahutusradiaatide rakendamine mängib kõrgematel vooludel töötades rolli L298N jõudluses?Absoluutselt on soojuslikkuse efektiivsuse haldamine sageli piirav tegur, mis mõjutab juhi nii funktsionaalsust kui ka eluiga.Optokoulerite kasutamine võib isoleerida ka mootori toiteallikast pärit juhtimissignaale, suurendades seeläbi ohutust ja süsteemi üldist töökindlust.
Lõpuks on nende Pinouti diagrammide põhjalik mõistmine ja nõuetekohane rakendamine ülioluline, et L293D ja L298N mootorijuhid tõhusalt toimiksid.Kas robootika või tööstusautomaatika osas on need komponendid arvukate süsteemide selgrooks.Seega on sügavam ülevaade nende konfiguratsioonidest väga kasulik kõigile, kes on seotud nende valdkondade disaini ja arendamisega.
L293D ja L298N spetsifikatsioonid
L293D ja L298N on kaks tavaliselt kasutatavat mootorijuhi moodulit, eriti robootika- ja elektroonikaprojektides.Need IC -d on spetsialiseerunud mootorite juhtimiseks, pakkudes mikrokontrolleri ja mootorite vahel vajalikku võimsuse võimendust.See amplifikatsioon on sageli ülioluline, kuna tavaliselt ei suuda mikrokontrollerid otse voolu otse varustada.
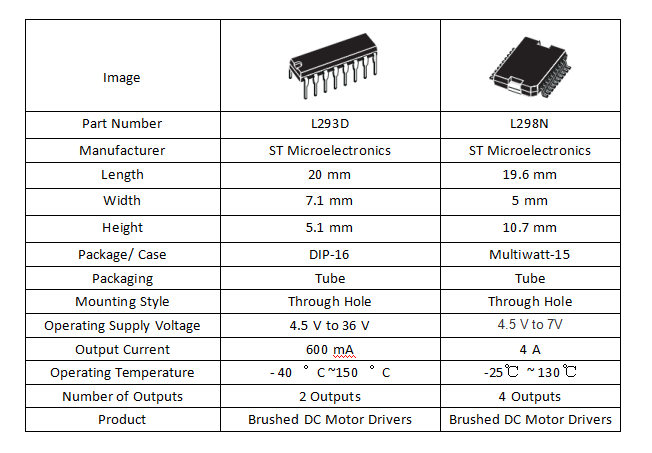
Mis teeb L293D huvitavaks valikuks?L293D on neljakordselt kõrge voolu pool-H draiver.See on võimeline juhtima kahesuunalist voolu kuni 600 mA kanali kohta, maksimaalse väljundvooluga 1,2A kanali kohta mitte-korduvate impulsside korral.Töötades pingevahemikus 4,5 V kuni 36 V, paistab L293D silma sisemiste klambrite dioodide lisamisega, mis aitavad kaitsta vooluahelat mootorite genereeritud tagakülje eest.Tekib küsimus: miks on sisemisklambi dioodid kasulikud?Need dioodid aitavad kaasa seadme usaldusväärsusele väikesemahuliste robootikaprojektide puhul.
Praktilistes rakendustes valitakse L293D sageli automatiseeritud juhitavate sõidukite (AGV) ja lihtsate robotrelvade projektide jaoks.Selle sirgjooneline disain ja integratsiooni lihtsus suurendavad selle atraktiivsust harrastajate ja inseneride seas.Näiteks võivad meeskonnad ülikooli robootikavõistlusel valida oma kompaktsete mobiilsete robotite jaoks L293D tulemuslikkuse ja lihtsuse tasakaalu tõttu.Kas see sobib selliste võistluste jaoks hästi?Selle lihtsuse ja funktsionaalsuse tasakaal on tõepoolest üsna kaalukas.
Teisest küljest, miks võiks kaaluda L298N -i?L298N on kahekordne H-silla mootori juht, mis suudab sõita voolu kuni 2A kanali kohta, mille maksimaalne vooluvõimsus on 3A.Selle tööpinge on vahemikus 4,5 V kuni 46 V, muutes selle sobivaks laiema rakenduse jaoks, sealhulgas nõudlikumate energiavajadustega mootorite jaoks.Erinevalt L293D -st ei ole L298N -il sisemisi klambridioode, mis nõuavad väliseid dioode, et kaitseks EMF -i eest.Vaatamata sellele muudavad L298Ni vastupidavus ja kõrgemad vooluvõimalused selle sobivaks keerukamateks ja võimsamateks robotrakendusteks.
Spetsialistid kasutavad L298N sageli edasijõudnute projektides nagu automatiseeritud masinad ja suured robotplatvormid.Kujutage ette tööstuslikku seadet: L298N võidakse valida konveierisüsteemi mootorite juhtimiseks, arvestades selle võimet hakkama saada suurema voolukoormuse ja tugeva jõudlusega karmides tingimustes.Kas see on parim valik tööstuslike rakenduste jaoks?Selle vastupidavus viitab sellele.
Mõlemat IC-d hindades tuleb kaaluda kompromisse praeguse võimekuse, kaitsefunktsioonide ja integratsiooni lihtsuse vahel.Väiksemate projektide puhul, kus lihtsus ja kiire kasutuselevõtt on suurem väärtus, eelistatakse sageli L293D.Seevastu projektide jaoks, mis vajavad suuremat võimu ja tugevamat jõudlust, on L298N parem valik.
Lõppkokkuvõttes sõltub L293D ja L298N vaheline otsus konkreetsetest projektinõuetest, mis hõlmavad kasutatavate mootorite tüüpi, praeguseid vajadusi ja operatiivkeskkonda.Mõlemad IC -d on näidanud oma väärtust paljudes praktilistes rakendustes, pakkudes usaldusväärseid ja tõhusaid mootori juhtimislahendusi.
L293D ja L298N omadused
L293D funktsioonid ja rakendused
L293D mootorijuhi IC -l on erinevate rakenduste jaoks sobivate võimaluste valik.See on saadaval nii DIP kui ka SOIC -pakettides.Miks see oluline on?Noh, see lisab paindlikkust erinevate vooluahela kujunduse jaoks.See hõlmab sisseehitatud ülevool ja ülevoolukaitse, suurendades stabiilsust erinevates tingimustes.
Peamised spetsifikatsioonid
- ajab nii alalisvoolu kui ka astmemootoreid
- väljundvoolud kuni 1,2A
Kas need funktsioonid muudavad selle paljude juhtimissüsteemide jaoks kohandatavaks?Absoluutselt.
Projektides kasutamine
Praktiliste stsenaariumide korral valitakse L293D sageli väiksematel projektidel ja hariduslikel eesmärkidel.Kujutage ette, et harrastaja ehitab lihtsa roboti.Algajad eelistavad mootori liikumise juhtimiseks sageli L293D -d.Miks?See on kulutõhus ja sirgjooneline juhtmega tavaliste mikrokontrolleritega nagu Arduino või Raspberry Pi.
Konkreetsed stsenaariumid
- Mootori voolu nõuded on tagasihoidlikud.
-Sisseehitatud kaitsefunktsioonid aitavad vältida lühise tingimustes või termiliste ülekoormustes.
Kui need tingimused on täidetud, saab kogu süsteemi eluiga pikendada.
L298N funktsioonid ja rakendused
L298N mootorijuhi IC koosneb kahest H-silla ahelast.Mida see kasutajate jaoks tähendab?See võimaldab juhtida kahe alalisvoolu mootori suunda ja kiirust.See konfiguratsioon on eriti kasulik kahemootoriliste draivirakenduste, näiteks robootika ja autosüsteemide puhul.
Peamised spetsifikatsioonid
- toetab standardseid 5V loogikaväljundeid
- ühildub laia valiku mikrokontrolleritega
Kas L298N on kasutajasõbralik?Jah see on.Selle ühenduse tihvtid lihtsustavad integratsiooniprotsessi erinevate elektrooniliste seadistustega.See saab mootori kiirust reguleerida, kasutades impulsi laiuse modulatsiooni (PWM) signaale.
Projektides kasutamine
Praktiline rakendus, kus L298N silma paistab väikeste robotplatvormide väljatöötamisel-mõtlevad hariduslikud STEM-programmid või DIY ise tasakaalustavad robotid.See haldab kõrgemaid voolusid ja annab usaldusväärse kontrolli nõudlikes tingimustes.
Konkreetsed stsenaariumid
- Mootori keeruka koordineerimist vajav keskkond
Siin muutub L298N hädavajalikuks.
Võrdlev perspektiiv
Laiemast vaatenurgast sõltub L293D ja L298N vahel valimine sageli konkreetsetest rakendusnõuetest.Sellised tegurid nagu praegune võimsus, suuruse piirangud ja kontroll keerukus mängivad otsustamisel olulist rolli.
Valikukriteeriumid
- tugeva juhtimise ja kõrgema voolu väljundi jaoks: L298N
- hariduslike kontekstide ja vähem nõudlike rakenduste jaoks: L293D
Minu kogemuse kohaselt määravad need kriteeriumid sageli parima valiku.
Nii L293D kui ka L298N on hindamatu tööriistad kõigile, kes on seotud elektroonika ja robootikaga, alates algajatest kuni arenenud kasutajateni.Need on mitmekülgsed, usaldusväärsed ja kasutajasõbralikud, muutes need oluliseks erinevates projektides ja hariduslikes püüdlustes.
Erinevused L293D ja L298N vahel
Pakend
L293D võtab omaks kaherealise paketi (DIP), andes kosmosepiiratud kujundustes olulisele kompaktsuse tasemele.See kompaktne dispositsioon osutub hädavajalikuks projektides, kus ruumiline tõhusus on pöördeline.Teise võimalusena uhkeldab L298N mitmepoolse joonega paketi, suurendades selle sobivust suure võimsusega rakenduste jaoks, mis nõuavad tugevat füüsilist integratsiooni.
Miks näeme nende autojuhtide vahel pakendamisel sellist hääldatavat dispersiooni?
Vastus peitub nende kavandatud rakenduse ulatuses ja vajalikus toitekäitluses.
Voolu- ja pinge
L293D annab tippvoolu 600 mA-sid H-silla kohta, ulatudes lühikeste kestuste korral kuni 1,2A-ni.Seevastu L298N annab igale H-sillale märkimisväärselt vastupidava vooluvõimsuse 2A, mis töötab laia pingevahemiku jooksul 2,5 V kuni 48 V.See terav kontrast piiritleb nende rakendusdomeenid: kerged haridusalgatused versus nõudlikud mootoriga mudeliautod.
Kuidas mõjutab praegune suutlikkuse projekti valimist?
Sisuliselt tähendab suurem vooluvõimsus raskemate koormuste suuremat operatiivset ulatust.
Kiibi tüüp
L293D on oma olemuselt kohandatud astmeliste mootorirakenduste jaoks, rõhutades täpsust positsiooni juhtimisel.Vahepeal näitas L298N H-silla draiverina oskust juhtida nii alalisvoolu mootorite kui ka ajameid kõrgematel tingimustel.DIY -elektroonika harrastajad hindavad L293D -d sageli täpsete juhtimisülesannete täitmiseks, samas kui L298Ni mitmekülgsus leiab soosingut pingutavamates rakendustes.
Küttenõuded
Oluliste koormuse tingimustes võib L293D vajada soojuse kogunemise tõttu minimaalset jahutusabi.Seevastu L298N nõuab termilise kogunemise vastu võitlemiseks oluliselt põhjalikumaid jahutuslahendusi, näiteks jahutusvalamuid või jahutusventilatsioone.Näiteks sunnib suure võimsusega mootorite pidev toimimine koos L298N-ga praktikud rakendama tugevaid soojusjuhtimisstrateegiaid, et vältida ülekuumenemist.
Kas ennetav jahutushaldus on oluline elektroonilise disaini osas?
Ennetavad jahutusmeetmed on süsteemi terviklikkuse ja töö pikaealisuse säilitamiseks üliolulised.
Juhtimisliides
L293D kasutab suuna- ja olekuhalduse jaoks loogikataseme juhtimist, samas kui L298N laiendab seda, lisades loogikataseme suunajuhtimise kõrval Nusioonilise kiiruse juhtimise PWM-signaale.See L298N pakutav nüansseeritud kontroll osutub oluliseks rakenduste jaoks, mis nõuavad täpset kiiruse reguleerimist.
OptocoUpleri olemasolu
L293D -s optokouleri puudumine suurendab selle vastuvõtlikkust mikrokontrolleri häirete suhtes.Seevastu L298Ni integreeritud OptoCoupleri isolatsioon soodustab süsteemi stabiilsust, mis on otsustav tegur elektroonilise müraga ja nõuab signaali täpsust.
OptocoUpleri lisamine on tahtlik disainivalik müratundlike keskkondade jaoks.
Funktsionaalsus
Nii L293D kui ka L298N on kahe sillaga draiverid, mis on võimelised haldama kahte alalisvoolu mootorit või ühte astmemootorit.Kuid L298N saab hakkama oluliselt suuremate praeguste nõudmistega, juhendades insenere valima madalama vooluülesannete jaoks L293D ja lülituda kõrgemate voolurakenduste jaoks L298N -le.
Rakenduse stsenaariumid
L293D leiab oma niši vähese energiatarbega rakendustes, näiteks haridusprojektid või deminutiivne robootika.Seevastu L298N on sobiv nõudlikumate stsenaariumide jaoks, sealhulgas edasijõudnute robootika ja mootoriga modelliautod.Praktiliste teadmiste kaudu ilmneb, et nende autojuhtide valik mõjutab märkimisväärselt projekti jõudlust ja usaldusväärsust.
Ühiselt toetavad L293D ja L298N alalisvoolu mootorite edasisi ja tagurpidi juhtimist, samuti PWM -i kiiruse reguleerimist.Nende vahetatavat kasutamist erinevates rakendustes hinnatakse kõrgelt, eriti prototüüpimise ja iteratiivse arengu ajal, kus otsitakse paindlikkust ja usaldusväärset toimimist.
Korduma kippuvad küsimused [KKK]
1. Mis on L293D?
Kas olete kunagi mõelnud, mis hoiab väikeseid alalisvoolumootoreid sujuvalt mõlemas suunas?Sisestage L293D-16-kontaktiline mootorjuht IC.See suudab samaaegselt juhtida kahte alalisvoolu mootorit, hallates kuni 600 mA kahesuunalise ajami voolu ja töötades pingevahemiku vahemikus 4,5 V kuni 36 V.Kas see pole mitmekülgne?
2. Milline on L293D draiveri funktsioon?
L293D ei tähenda ainult mootorite juhtimist eri suundades.See draiveri IC on loodud kuni 600 mA kahesuunalise ajami vooluga 4,5 V kuni 36 V pingevahemikku.Tähelepanuväärsed on selle sobivus induktiivsete koormuste nagu releede, solenoidide, alalisvoolu mootorite ja isegi bipolaarsete astmeliste mootorite juhtimiseks.Insenerid hellitavad selle madalat energiatarbimist ja kompaktset jalajälge, eriti hobiprojektides või rakendustes, kus prioriteet on tõhusus.Kas pole põnev, kuidas sellised pisikesed komponendid võivad nii suurt mõju avaldada?
3. Kui palju võimsust L298N kasutab?
L298N kaldub tunnustatud L298N Dual H-Bridge Motor Draiveri kiipi.See uhkeldab pingeoperatsioonide vahemikku 5 kuni 35 V, hoides suutlikkust mootorite juhtimiseks kuni 2A vooluga kanali kohta.See võime muudab selle robootika- ja tööstusautomaatikaprojektide jaoks, mis volitavad kõrgemat voolu ja pinget.Huvitav, kas te ei ütleks, et selle jõulisus vihjab selle suure võimsusega?
4. Mitu mootorit saab L298N -i juhtida?
Kasutaja seisukohast on L298N moodul väga mitmekülgne.See suudab juhtida kuni 4 alalisvoolu mootorit või hallata 2 alalisvoolu mootorit suuna ja kiiruse juhtimise atribuutidega.See mitmekülgsus tähendab, et see leiab kodu keeruka mootori juhtimiskonfiguratsioonides, osutudes hädavajalikuks hariduslike robootika ja DIY automatiseerimisprojektides.Mida ehitaksite sellise paindliku tööriistaga?
5. Mis vahe on L293D ja L298N vahel?
L293D ja L298N mootorijuhi ICS -i võrdlemisel on ülioluline nende pinge ja vooluvõimalused lahutada.L293D töötab pingevahemikus 4,5 V kuni 36 V ja suudab hallata kuni 600 mA praegust kanali kohta.See muudab selle väikeste ja keskmise suurusega alalisvoolumootorite jaoks sobivaks.Teisest küljest on L298N silma paista kuni 46 V töövahemikuga ja võimega käsitseda kuni 2A kanali kohta, mis sobib ideaalselt suuremate mootorite jaoks või rohkem nõudlike stsenaariumide jaoks.Niisiis on nende kahe vahel valimisel oluline teie konkreetse rakenduse pinge ja praeguste vajaduste tähelepanelik hindamine nii jõudluse kui ka töökindluse tagamiseks.Kas olete kunagi sellise otsuste tegemise olukorraga silmitsi seisnud?
funktsiooni test.Kõige kõrgemad kulutõhusad tooted ja parim teenus on meie igavene kohustus.
Kuum artikkel
- On CR2032 ja CR2016 vahetatavad
- MOSFET: määratlus, tööpõhimõte ja valik
- Relee paigaldamine ja testimine, relee juhtmestiku skeemide tõlgendamine
- CR2016 vs CR2032 Mis vahe on
- NPN vs PNP: Mis vahe on?
- ESP32 vs STM32: milline mikrokontroller on teie jaoks parem?
- LM358 kahekordne operatiivne võimendi põhjalik juhend: pinoutid, vooluahela skeemid, samaväärsed, kasulikud näited
- CR2032 VS DL2032 VS CR2025 Võrdlusjuhend
- Erinevuste mõistmine ESP32 ja ESP32-S3 tehnilise ja jõudluse analüüs
- RC -seeria vooluringi üksikasjalik analüüs
 Keemilise energia kasutamine elektri tootmiseks
Keemilise energia kasutamine elektri tootmiseks
2024-07-15
 1N4148 väikeste signaalide vahetamise dioodide sümbol, tööpõhimõte, paketid ja muud üksikasjad
1N4148 väikeste signaalide vahetamise dioodide sümbol, tööpõhimõte, paketid ja muud üksikasjad
2024-07-12
Kuum osa number
 EEE-FK0J221AP
EEE-FK0J221AP 06031C103K4Z2A
06031C103K4Z2A AC0603JRNPO9BN160
AC0603JRNPO9BN160 08053A821KAT2A
08053A821KAT2A- LD051A561JAB4A
 1812HC122KAT1A
1812HC122KAT1A T491D157M006AT
T491D157M006AT TACL685K003RTA
TACL685K003RTA SI6469DQ-T1-E3
SI6469DQ-T1-E3 GRM0335C1E1R8CD01D
GRM0335C1E1R8CD01D
- AT49F512-90JI
- AL1697-20CS7-13
- MAX205ECPG+
- RT0603DRE0782KL
- PI5C33X257BEX
- BSM100GB160D
- ADG4612BRUZ
- XCS30XL-4BG256C
- LTC2640AITS8-HZ12#TRPBF
- FDS9926A
- BD8266EFV-ME2
- MJD3055T4G
- MX9G3B
- DRV8832QDGQQ1
- AD5270BRMZ-100-RL7
- LT3080IDD-1#PBF
- TPS61202DRCR
- ATV750BL-15DM/883C
- BR24L08FV-E2
- EWIXP425ABBT
- K6X4016T3F-UF55
- LCMXO640C-4FT256C-3I
- MAX1779EUE-T
- MAX785SCAI-T
- MAX98730EWJ+
- MBM29DL32BF-70PBT-J
- S-24C64AOI-T8T1G
- SI9182DH-28-TI
- TC74HCT374AFW
- XC17S50AS020C
- XR88C681CJ
- AM79C610
- M30612E8QP
- R2S25402AFT#W5
- NF-430-N-A3
- R1P2G7218RBG-20R
- KAQV216A
- LCMXO2280C-3FTN324C7U
- SDINBDA6-16G